Tema 5 (Parte 1): Control Automático de Procesos Industriales mediante PLC.pdf
aalbeerto_02
DIAPOSITIVAS TEORÍA

Presentación de la Asignatura.pdf
20 páginas

Tema 5 (Parte 2): Diseño e Implementación de Diagramas GRAFCET para Automatización.pdf
40 páginas
Tema 5 (Parte 1): Control Automático de Procesos Industriales mediante PLC.pdf
61 páginas

Tema 4: Sensores y Actuadores Industriales (Actuadores Eléctricos, Hidráulicos, Neumáticos y Servomecanismos).pdf
36 páginas
Tema 3 (Parte 4): Ejercicios.pdf
10 páginas
Tema 3 (Parte 3): Cinemática Diferencial del Robot.pdf
14 páginas
Tema 3 (Parte 2): Cinemática Inversa del Robot.pdf
22 páginas
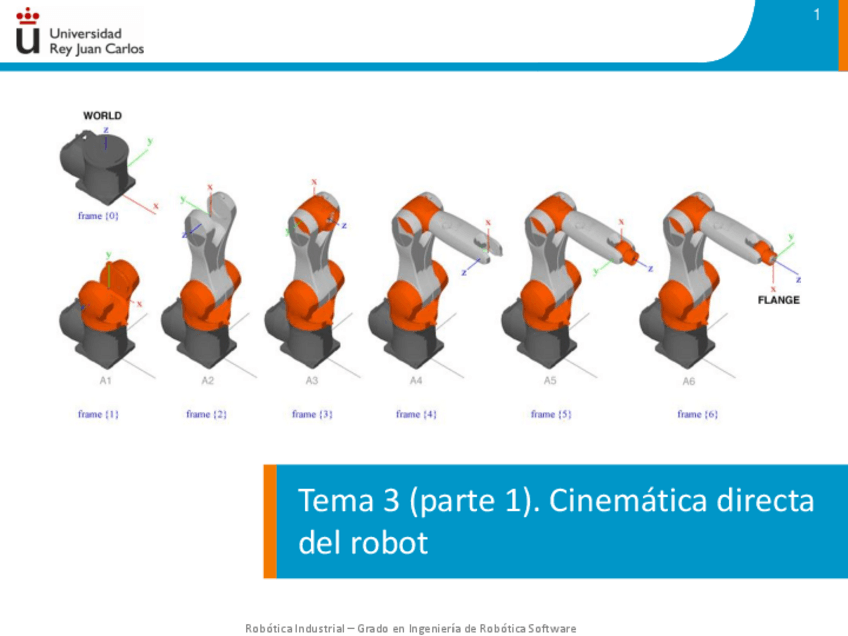
Tema 3 (Parte 1): Cinemática Directa del Robot.pdf
24 páginas
Tema 2 (Parte 2): Herramientas Matemáticas para la Localización Espacial.pdf
43 páginas
Tema 2 (Parte 1): Morfología y Configuración del Robot.pdf
39 páginas
Tema 1: Introducción a la Robótica Industrial y las Aplicaciones Industriales Robotizadas (Manipuladores Cooperativos).pdf
31 páginas
